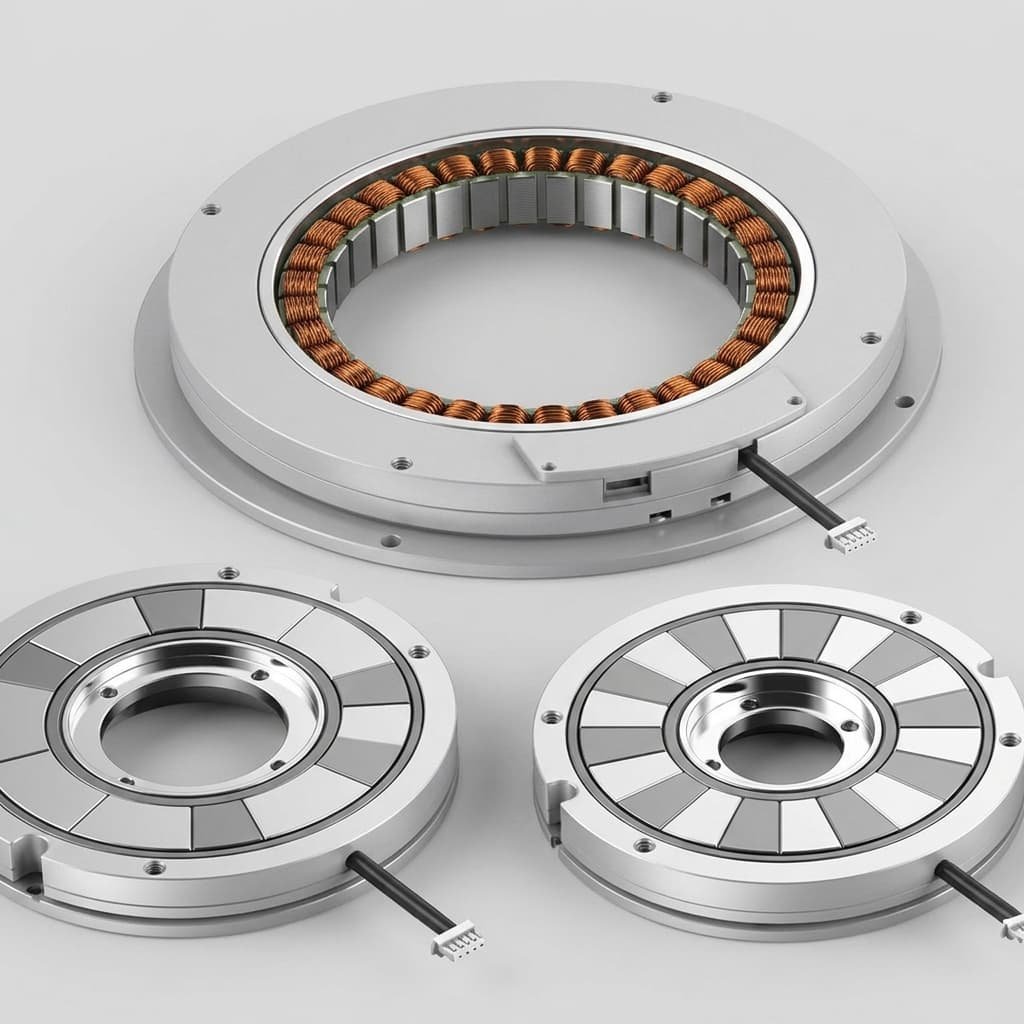
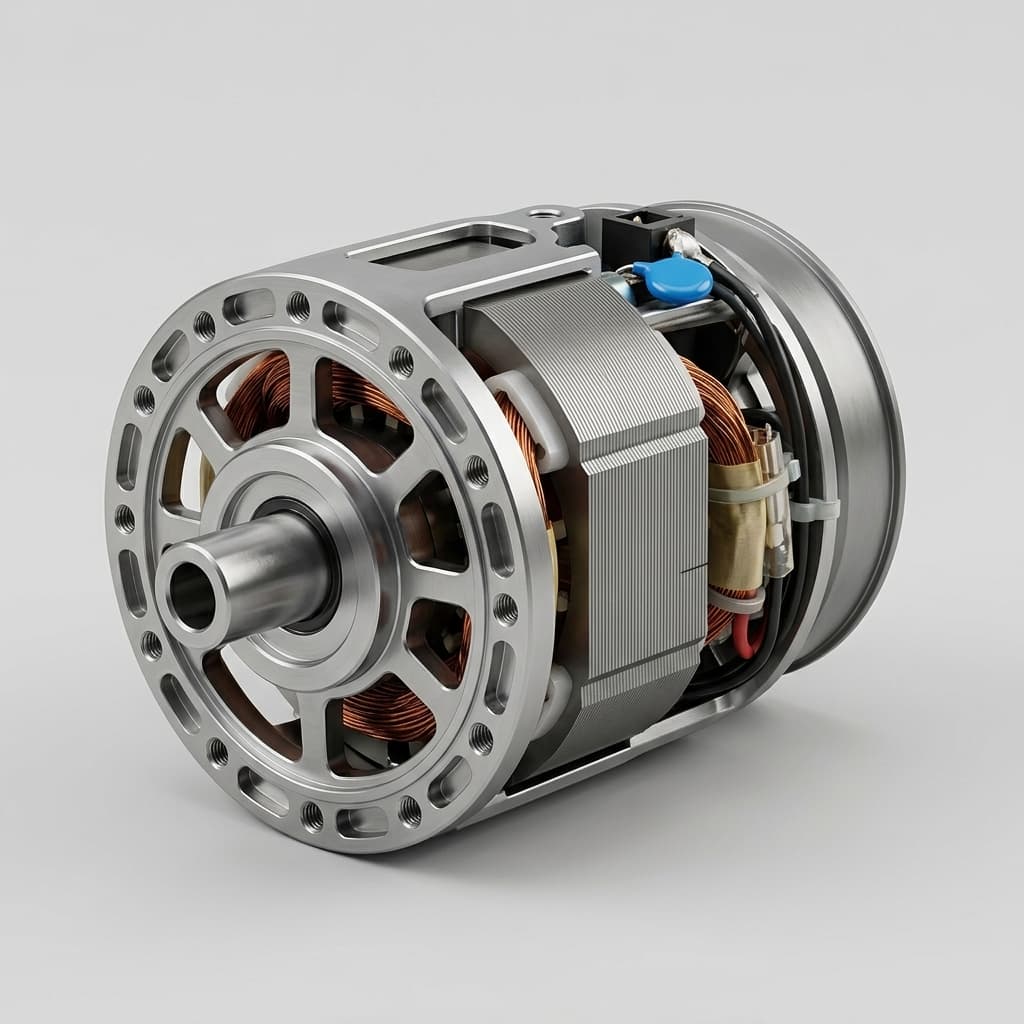
Factory-side rotor and stator kit sourcing for industrial OEM projects, from compact robot joint motors to large hollow-shaft direct-drive torque motors and custom motor assemblies.
Use this page as a pre-RFQ navigator: pick the product family, capture the correct OD/ID, torque-speed, voltage, thermal, and integration inputs, then move directly to sample validation criteria that buyers can approve.
How to Select the Right Path
Define required torque at target speed and acceleration profile.
Choose winding, voltage, sensor, and servo drive assumptions.
Set sample acceptance criteria before quotation freeze.
Use the RFQ checklist before requesting custom winding or CAD files.
Size and Architecture Matrix for First Screening
Use this matrix before asking for a part number. Frameless motor selection usually starts from physical packaging: OD, ID, stack length, through-hole need, reducer fit, and thermal path. Final torque values still require the exact winding and cooling basis.
Screening Band
Typical Use
Architecture Cue
RFQ Data to Lock
Mini / compact OD below 50 mm
Small robot joints, compact actuators, medical or lab modules
Prioritize torque density, lead exit, sensor space, and low-speed smoothness.
OD/ID, stack limit, reducer or bearing layout, current limit, sample purpose.
Standard OD 50-150 mm
Cobot joints, direct-drive rotary axes, inspection and automation modules
Balance continuous torque, thermal path, rotor retention, and drive voltage.