Frameless Torque Motor Selection, Integration, and RFQ Guides
Practical engineering pages for buyers preparing a frameless torque motor RFQ, checking installation risk, or requesting CAD and datasheet files.
How These Resources Help a Buyer Move Faster
A frameless torque motor RFQ is not only a part-number request. The supplier needs enough information to judge mechanical fit, torque-speed duty, winding direction, thermal limits, sample acceptance, and delivery scope. This resource hub is organized to help a buyer turn an early idea into a review-ready technical package.
Buyer Question
Best Resource
Useful Output
Which motor architecture should we start from?
Selection guide
A shortlist based on OD, ID, torque, speed, cooling, and drive limits.
What can go wrong during assembly?
Installation guide
Air gap, rotor retention, lead routing, and post-assembly check items.
What should we send for a useful quotation?
RFQ checklist
A complete engineering and commercial intake list for the first supplier reply.
When should CAD or datasheets be requested?
CAD and datasheets
A file request tied to drawing revision, selected winding, and sample target.
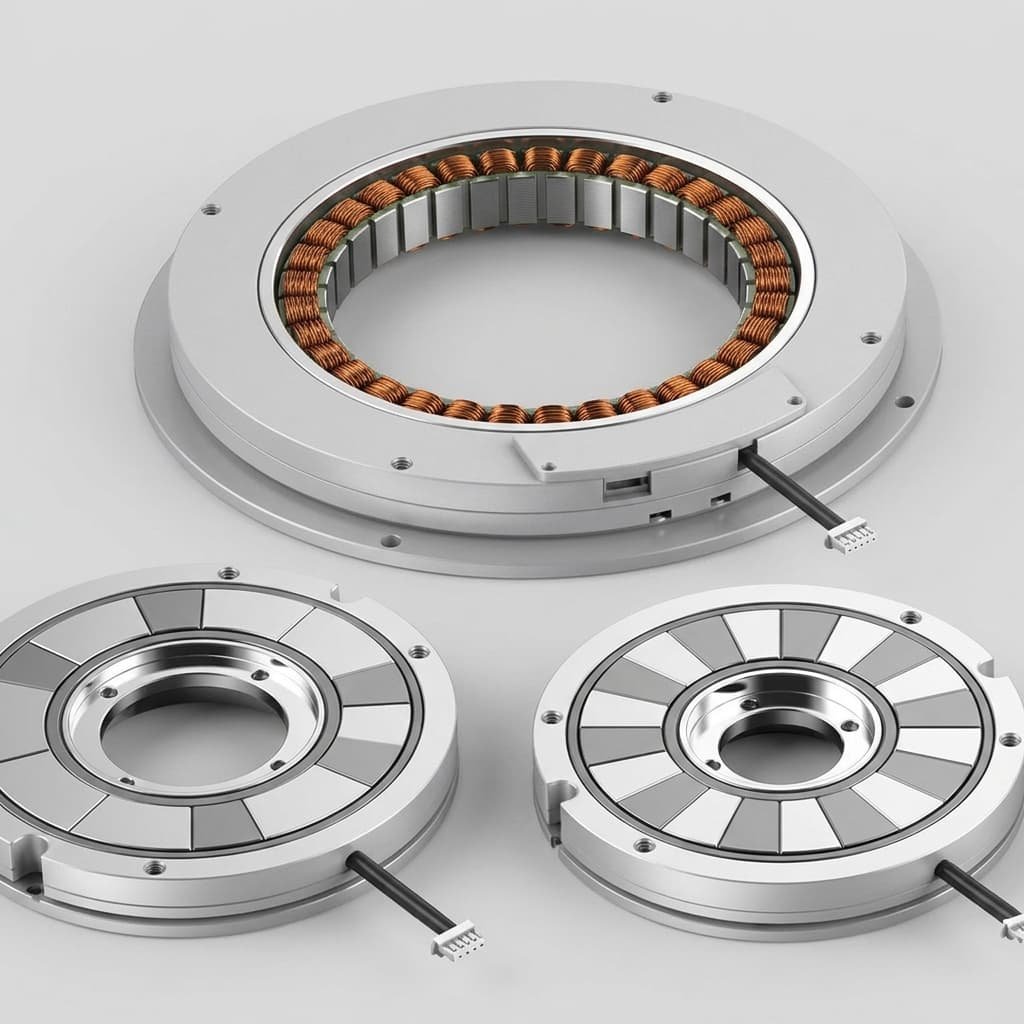
Frameless Torque Motor Selection Guide
A practical checklist for matching torque, speed, voltage, thermal path, ID/OD geometry, and integration constraints before RFQ.
Define continuous torque from real duty cycle and cooling assumptions.
Match winding, bus voltage, and drive current before sample planning.
Review OD, ID, stack length, air gap, and mounting method together.
The required data set for a useful quotation: geometry, torque-speed duty, electrical limits, cooling, environment, sensor needs, quantity, and timeline.
Target outside diameter, inside diameter, stack length, and available mounting envelope.
If your team is not sure where to start, collect the following baseline before the first engineering conversation. Unknown values can be marked as TBD, but fixed constraints should be clearly identified so the motor path is not over-assumed.
Mechanical envelope: OD, ID, stack length, mounting interface, bearing or encoder space, and lead exit preference.